
在智慧製造、醫療照護與國防應用等場域快速演進下,「仿生機器人技術」正逐步成為跨領域創新的核心驅動力。不同於傳統機械結構設計,仿生機器人以生物系統為靈感,模擬動物或人體的運動模式與感知行為,實現靈活運動、環境感知與人機互動等高階功能。從多關節協調控制、柔性致動機構,到視覺與觸覺融合感測,這項技術革新正重塑智慧系統的互動介面與操作邏輯。仿生設計不僅提升機器人在非結構化環境中的適應能力,更為高精度作業與人因工程帶來突破。本期電子報將深入解析仿生機器人的關鍵技術亮點與專利布局趨勢,掌握未來智慧機器與人類共融的新契機。
📌 技術功效魚骨分析
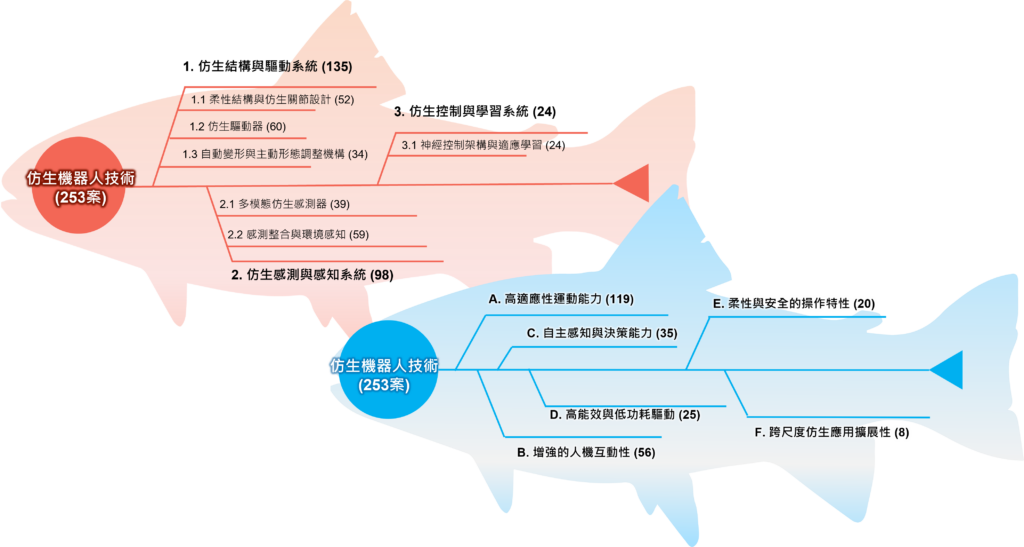
從253案仿生機器人相關專利觀察,可見該技術正朝向高整合應用與智慧化發展邁進。技術構面以「仿生驅動與運動系統」(135案)與「仿生感測與感知系統」(98案)為雙核心,其中又以「柔性結構與關節設計」(52案)與「感測整合與環境感知」(59案)兩項展現最密集的研發熱區,反映出產業界對仿生運動能力與感知智慧的高度關注。
對應至功效構面,仿生機器人技術明確對應「高適應性運動能力」(119案)與「強化的人機互動性」(56案),凸顯其在面對非結構化、動態環境中執行複雜任務的應用潛力。其他如「自主感知與決策能力」(35案)與「高能效與低功耗驅動」(25案)等指標,也反映出系統性能優化與實用化部署的整體發展方向。
整體而言,仿生機器人技術正從模仿生物機構與感知行為出發,逐步實現人機共融、自主互動的智慧系統,未來將在醫療輔助、精密檢修、教育陪伴與極端環境作業等場域中發揮關鍵作用,成為智慧機器技術鏈中的核心組案。
📌申請趨勢
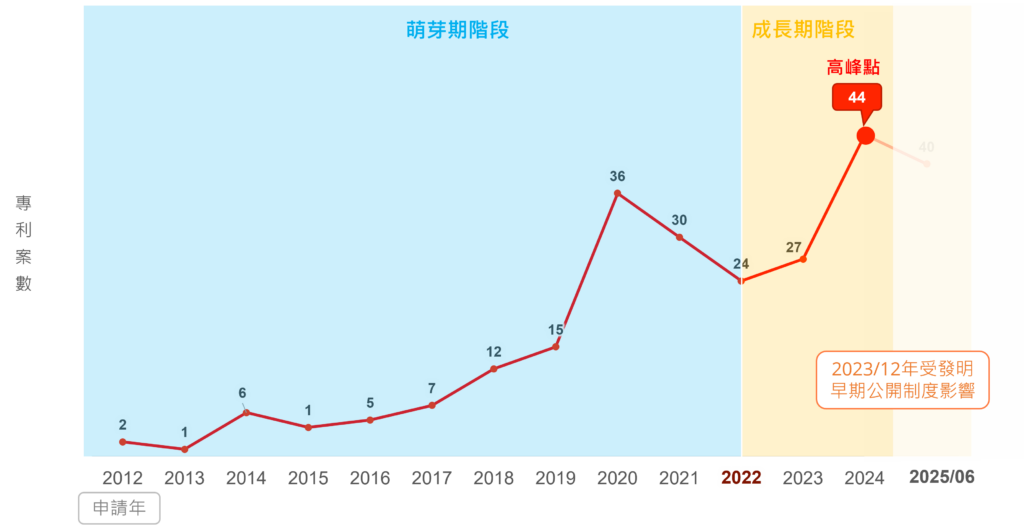
2022年被視為仿生機器人技術發展的重要分水嶺,象徵著該領域正式由「技術探索期」邁入「應用推進期」。從專利申請趨勢來看,2012至2017年間申請數量偏低,平均每年僅有1至6案,顯示當時仍以概念驗證與基礎研究為主。2018年起,隨著人工智慧、感測元案與機電整合技術的成熟,仿生機器人專利案數逐步攀升,至2020年首度突破30案,標誌著產業進入初步成長階段。
雖然2021與2022年略為回落,專利數分別為30與24案,但2023年再度回升至27案,2024年更達44案的歷史高點,反映出市場需求升溫與應用範疇拓展的雙重驅動。值得注意的是,2023年12月起施行的發明早期公開制度也催化了申請量激增,使技術布局更為密集並提前浮現。
此一波動向不僅展現出仿生機器人在醫療輔具、工業檢修、災害救援與智慧製造等應用場域中的潛力,也象徵技術重心正逐漸從學研推進至實際應用層面。未來成長關鍵將聚焦於跨域系統整合能力、智慧控制演算法發展與人機協作機制之優化,奠定仿生技術在次世代智慧系統中的核心地位。
📌申請國分析
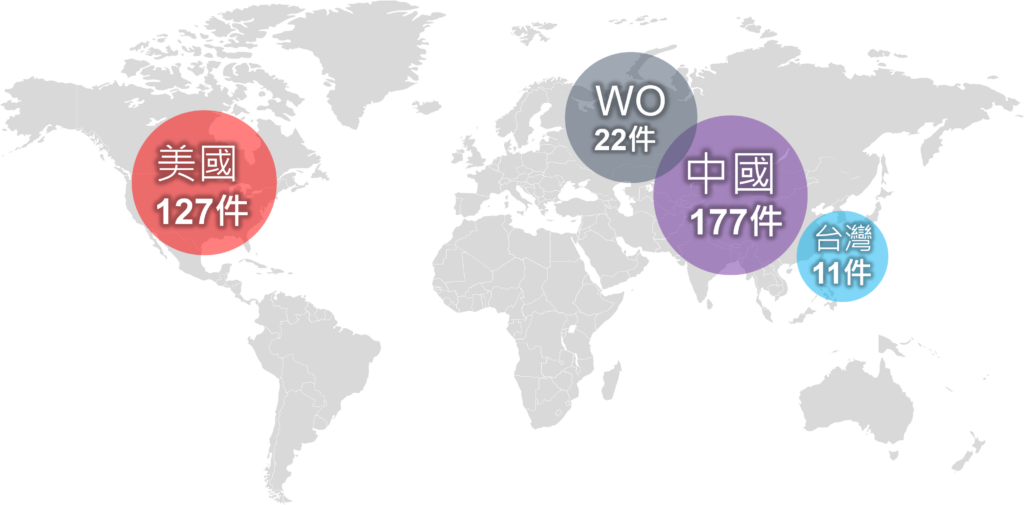
從仿生機器人技術的全球專利申請分布觀察,中國(CN)與美國(US)明顯居於領先地位,分別累計達177件與127件,展現對仿生技術自主掌握與產業落地的高度重視。中國長期投入柔性機構、感測融合與人機互動領域,形成大量應用導向專利群;美國則在神經控制架構、智慧演算法與醫療應用等方面持續推進,成為全球技術輸出的關鍵來源。
此外,國際專利(WO)累計22件,代表開發者高度關注跨國市場布局與技術擴散潛力,透過PCT體系進行全球化保護。台灣則以11件,聚焦在精密機構設計與感知互動模組領域,展現以特定應用場景為核心的策略性投入。
整體而言,仿生機器人領域的專利布局已從單點突破轉向全球擴散,開發策略不僅須考量技術優勢,也需搭配智慧財產權布局與市場落地節奏,方能有效鏈結智慧醫療、工業檢修、教育照護與極端作業環境等應用生態,實現技術商轉最大化。
📌所屬國分析
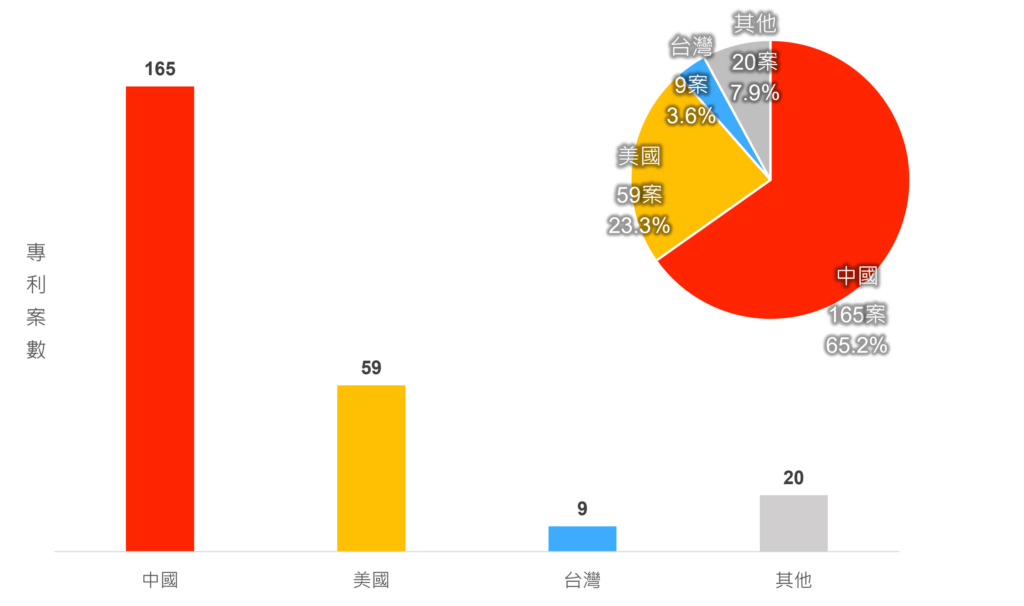
從專利權人所屬國統計來看,中國以165案、占比65.2%的壓倒性優勢領跑全球仿生機器人技術領域,反映出其長期政策扶持、科研資源集中與本土企業積極投入下所形成的強勁研發動能。無論在柔性機構、自主控制還是感知融合方面,中國均展現出完整而密集的專利布局。美國則以59案(23.3%)位居第二,顯示其在智慧演算法、生物感知與醫療機器人等應用領域持續保有全球創新影響力,亦是推動關鍵技術標準與商業化模式的核心地區。台灣目前累計9案(3.6%),雖數量不多,但已可見部分關鍵廠商針對特定應用(如復健輔具、服務機器人)進行策略性投入,未來有望在垂直應用場景中開展差異化競爭優勢。其他地區則共計20案(7.9%),呈現出仿生機器人技術正逐步吸引來自歐洲、東南亞與多國跨國企業的參與,顯示此領域不僅技術多元,亦具備高度的市場延展性與國際合作潛力。整體而言,仿生機器人技術的全球專利權布局正在從少數技術領先國向多元參與者擴展,未來將直接影響技術領導權、標準制定與跨國合作生態的重塑。
📌技術功效矩陣圖
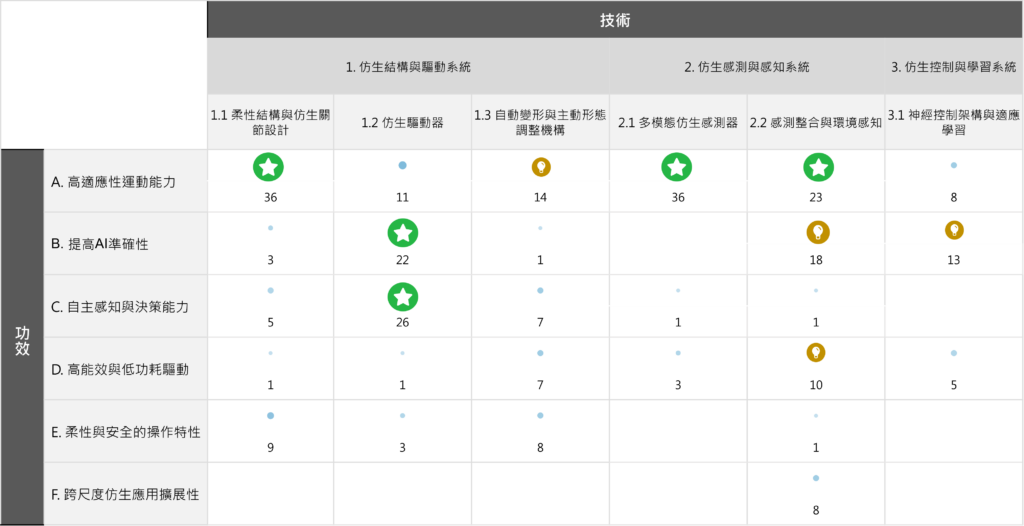
從技術功效矩陣圖可見,1.1 柔性結構與仿生關節設計、1.2 仿生驅動器、2.1 多模態仿生感測器與2.2 感測整合與環境感知等技術,在多項關鍵功效中展現高度關聯性,形成仿生機器人領域的新興技術熱區。其中,1.1 柔性結構與仿生關節設計與A. 高適應性運動能力對應最為明確,顯示仿生結構在實現靈活動作與環境適應方面具備關鍵影響力。1.2 仿生驅動器則在B. 提高 AI 準確性與C. 自主感知與決策能力上均有高度對應,展現出在控制精度與智能反應層面的重要性。感測模組方面,2.2 感測整合與環境感知技術在A. 高適應性運動能力與D. 高能效與低功耗驅動等多項功效中皆有布局,突顯其作為智慧感知中樞的技術價值。然而,圖中亦指出若干潛在技術缺口區。例如,1.3 自動變形與主動形態調整機構與3.1 神經控制架構與適應學習目前在E. 柔性與安全的操作特性與F. 跨尺度仿生應用擴展性等功效面仍屬稀疏,代表這些技術尚待強化與深化,有望成為未來研發突破點。整體來看,本次交叉分析揭示仿生機器人技術正逐步邁向多模組整合與智慧決策導向,亦提供清晰的技術導入優先順序與應用策略指引。
總結:
仿生機器人創新正加速進場,技術布局與市場策略需同步啟動。
從專利生命週期與技術結構觀察,
仿生機器人技術已於2022年邁入應用推進的成長關鍵期,
不僅驅動系統與感知模組持續創新,智慧控制與跨域整合亦逐步強化。
申請人數與專利數量雙雙攀升,
顯示全球投入者對此技術的產業價值與未來潛力高度認同。
中美為主戰場,歐日穩健布局,
台灣則具備垂直應用導入與模組測試的落地優勢。
建議企業與政策端應提早啟動技術布局與跨國合作策略,以掌握智慧機器時代人機共融的關鍵契機。



